Master Builder Prime · Level 2 · Term 1
Going the Distance
Build the Rhino. Crack the maths. Stop just before the wall.
Challenge: Going the Distance
Maths
4
Today we will:
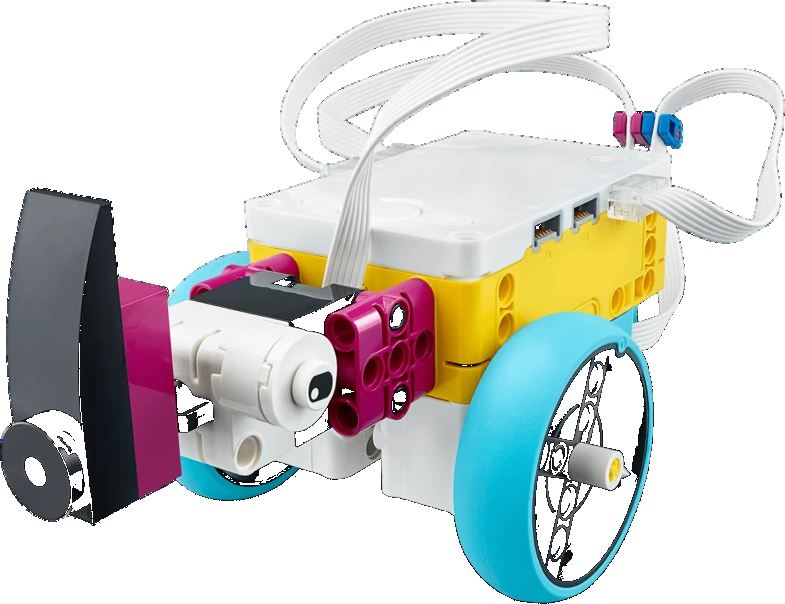
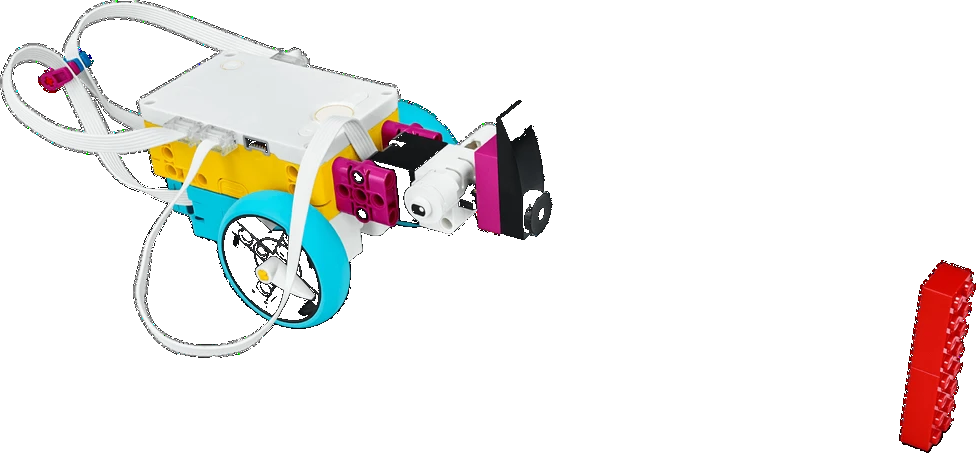
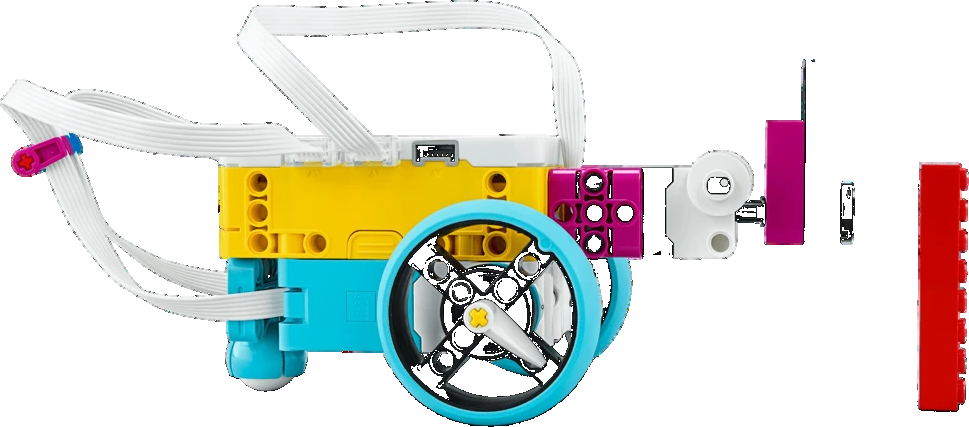
- 1Build the Rhino.
- 2Learn how to control the distance of motors with circumference.
- 3Test different speeds and wheels to see how it affects our Rhino.
Activity 1
Building and Testing
5
- Build the Rhino.
- Place your Rhino one meter away from a wall.
- Test your program.
Did the Rhino hit the wall?
YESNO
- Modify your code so the Rhino stops when its nose (the button) is pressed.
- Test your new code to make sure it works.
Activity 2
Calculations of Distance
5
How can we control the Rhino and stop it before it crashes?
- Calculate how many wheel rotations the Rhino can make before it hits the wall.
To calculate wheel rotations, we need to know the distance and the circumference.
distance
÷
circumference
=
number of rotations
🚀 Ask your teacher for this number — or have them show you how to calculate it yourself!
- Code your robot to move the correct number of rotations to stop just before the wall.
Build 1: Rhino — Extension Challenges
Stretch
C2
Sound
Can you make the Rhino play a noise when it starts charging, or gets hit?
Logic
What can you add to your code to make it keep driving forwards and stop when bumped?
Build
How could you change the Rhino so it can never be flipped over?
Sensor
Can you add a colour sensor to control when the Rhino starts?